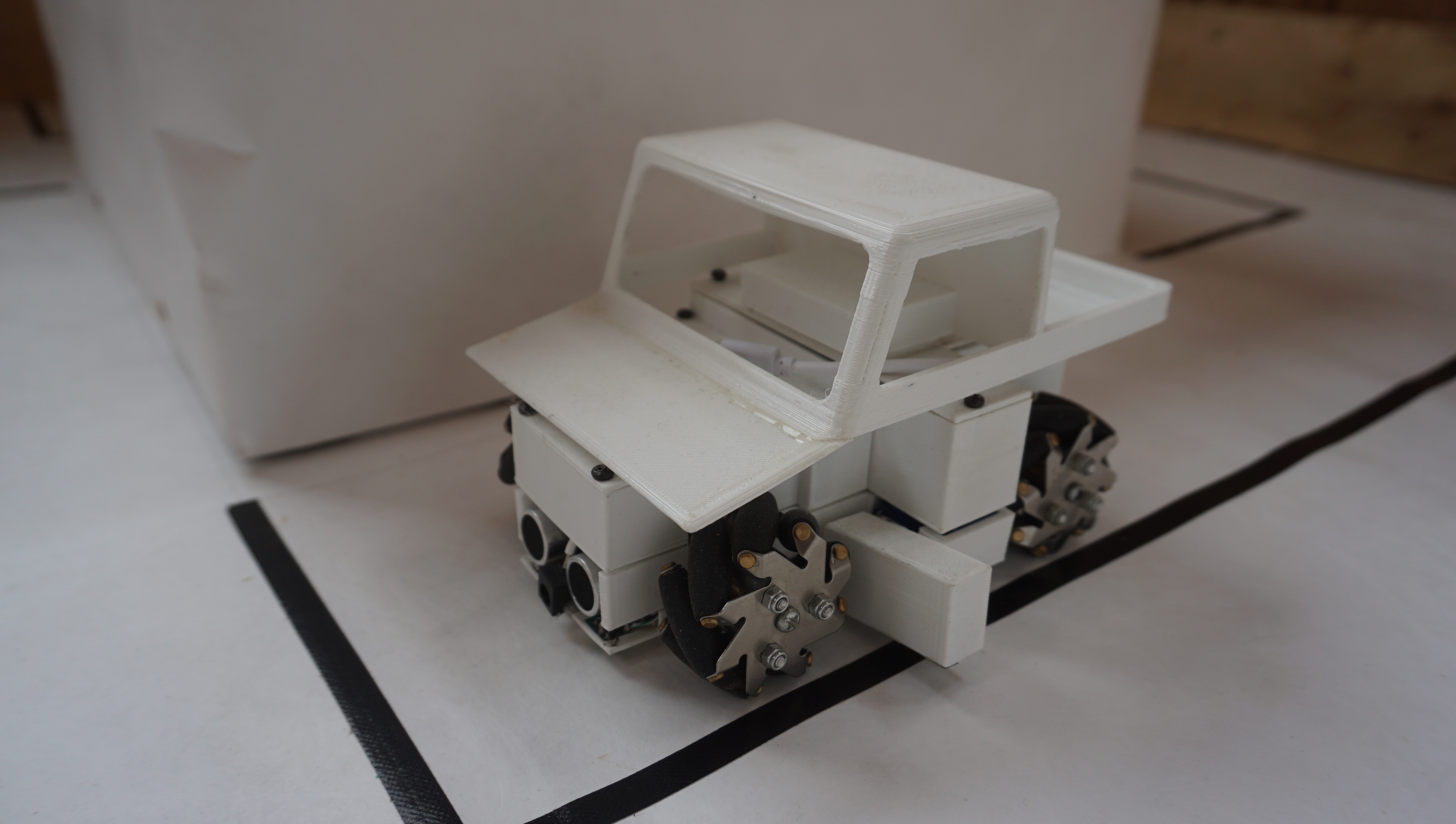
This project was created as part of my seminar paper in school, in which the practical part was the construction of a self-driving car. Now to the car: The approximately 17cm tall vehicle can move independently in a test environment with four buildings and several streets. The car is programmed so that it is normally parked in a parking space and drives to a house as soon as it is needed and waits there briefly to let an imaginary person get in. It then drives to the desired destination and also waits there so that the person can get out again. It then drives back to its car park and is ready for new jobs. The start and destination points, as well as manual control of the car, are entered via a self-programmed app.


The car can orientate itself using five infrared sensors, three on the side in an automatically retractable arm to detect the central lane and two at the front to detect the stop lines. There is also an ultrasonic sensor at the front and rear to recognise obstacles, crash barriers and houses. In addition, a gyroscope helps to make driving on straight roads easier and to ensure more precise control of the motors. The ten-part body and the superstructure of the vehicle are completely 3D-printed. Another special feature are the Mecanum tyres, which enable movement in all directions, as one wheel has eight additional freely rotating rollers. This means that the car can not only drive straight ahead or round bends, but can also turn on the spot or move sideways. These wheels are controlled by modified, continuously rotating MG90 servomotors. The 2S lithium-polymer battery can be charged either by an in-built induction coil or via a 5V input. All components and the Bluetooth module are controlled by the Arduino-compatible Mega 2560 PRO microcontroller.


A more detailed description of the project and general information about the technology of autonomous driving can be found in my seminar paper. The Arduino and processing code, as well as the app, can be found in my Github-Repo .
