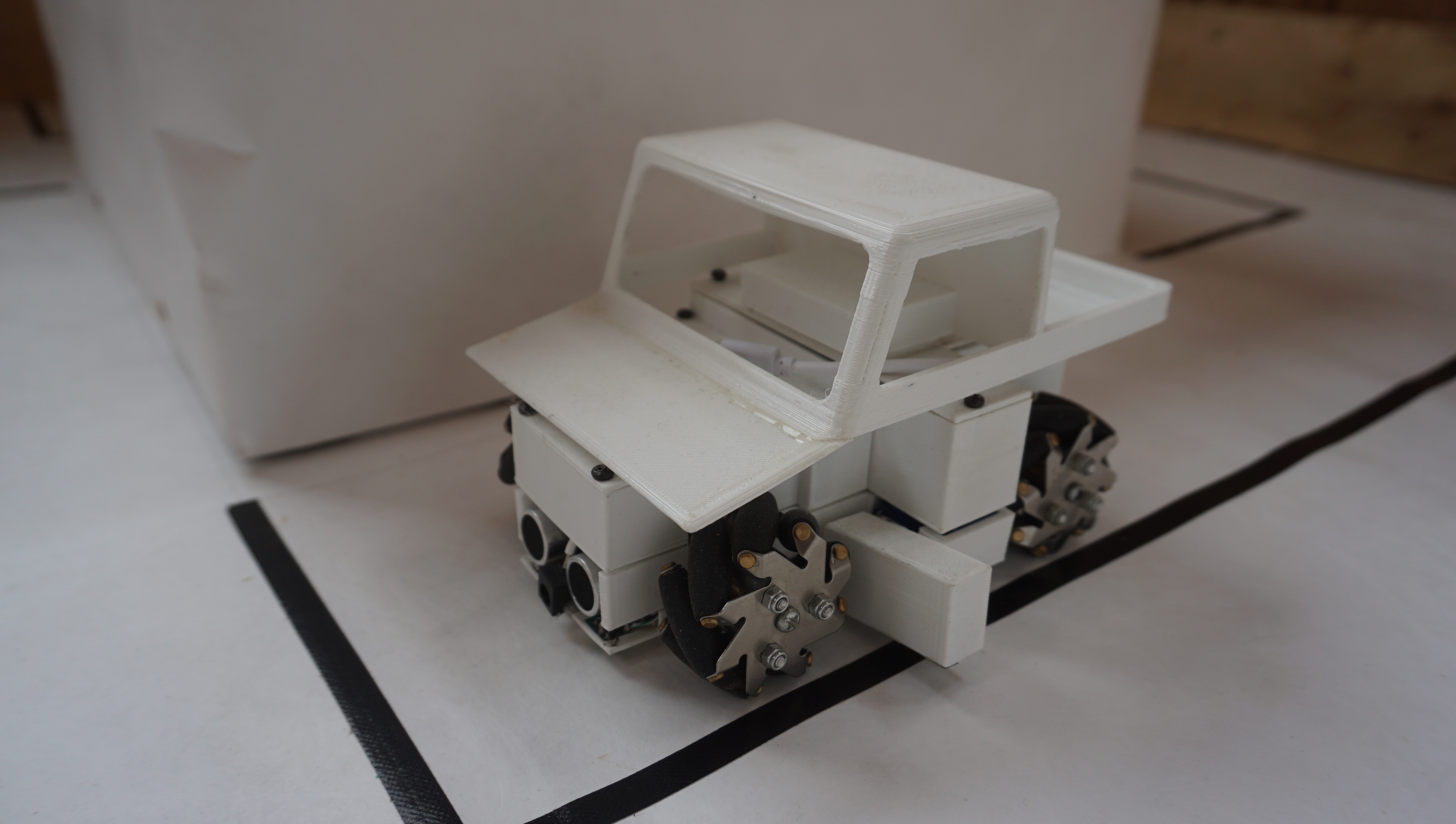
Dieses Projekt ist im Zuge meiner Seminararbeit entstanden, bei dem der praktische Teil der Bau eines selbstfahrenden Autos war. Nun zum Auto: Das etwa 17cm große Fahrzeug kann sich auf einer Testumgebung, mit vier Häusern und mehreren Straßen selbstständig bewegen. Das Auto ist so programmiert, dass es sich normalerweise auf einem Parkplatz befindet und sobald es benötigt wird zu einem Haus fährt und dort kurz wartet um eine imaginäre Person einsteigen zu lassen. Danach fährt es zum gewünschten Ziel und wartet dort ebenfalls, damit die Person wieder aussteigen kann. Anschließend fährt es wieder zurück zu seinem Parkplatz und ist dann bereit für neue Aufträge. Die Start- und Zielpunkt, sowie eine manuelle Steuerung des Autos wird über eine selbst programmierte App eingegeben.


Orientieren kann sich das Auto über fünf Infrarotsensoren, drei an der Seite in einem automatisch ausklappbaren Arm für die Mittelstreifenerkennung und zwei vorne um den Haltelinien wahrzunehmen. Außerdem ist vorne und hinten jeweils noch ein Ultraschallsensor angebraucht um Hindernisse, Leitplanken und Häuser zu erkennen. Zusätzlich hilft noch ein Gyroskop um die Fahrt auf geraden Straßen zu erleichtern, sowie eine genauere Ansteuerung der Motoren zu gewährleisten. Die zehn teilige Karosserie, sowie der Aufbau des Fahrzeugs ist komplett 3D-gedruckt. Eine weitere Besonderheit sind die Mecanumreifen, mit den eine Bewegung in alle Richtungen möglich ist, da in einem Rad acht weitere frei drehbare Rollen verbaut sind. Das bedeutet das Auto kann nicht nur geradeaus oder Kurven fahren, sondern es kann sich auch auf der Stelle drehen oder sich seitwärts bewegen. Angesteuert werden diese Räder mit modifizierten, kontinuierlich drehenden MG90 Servomotoren. Der 2S Lithium-Polymer-Akku kann entweder durch eine eingebaute Induktionsspule oder über einen 5V Eingang geladen werden. Angesteuert werden alle Komponenten, sowie das Bluetooth Modul mit dem Arduino-kompatiblen Mega 2560 PRO Mikrocontroller.


Eine detailliertere Beschreibung des Projekts und allgemeine Informationen über die Technik des autonomen Fahren sind in meiner Seminararbeit nachzulesen. Der Arduino und Processing Code, sowie die App sind in meinem Github-Repo zu finden.
